

- Products
- Overview
- 3-Series (30mm Pitch)
- M3 XBots
- S3 Flyways
- 4-Series (40mm Pitch)
- M4 XBots
- S4 Flyways
- Controller
- Turnkey Systems
- Videos
- Applications
- Highlights
- About
- About Us
- Careers
- Sales
- Direct Sales
- Tradeshows
- Tech Portal

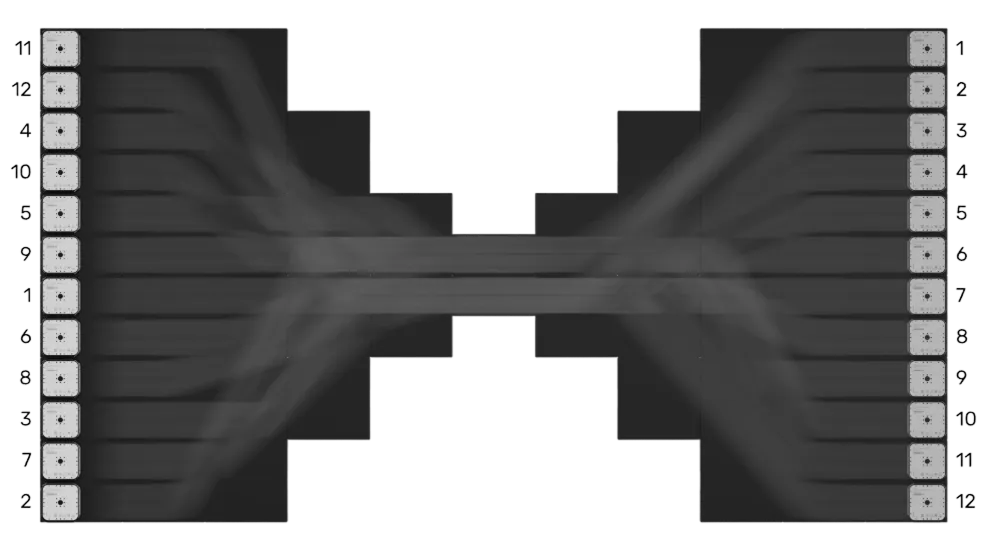
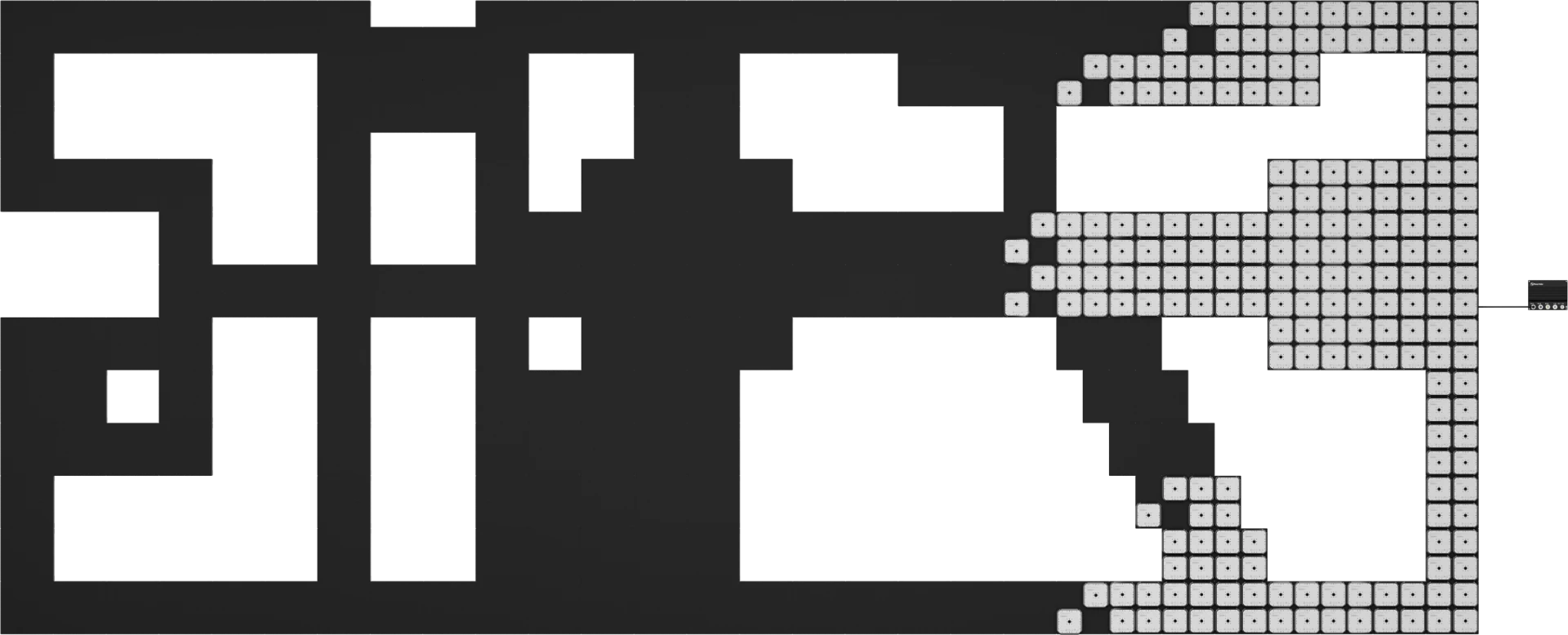
The PMC is the brain of a Planar Motor System. It takes care of all traffic, including routing and collision avoidance. With its multicore processor, the PMC can simultaneously control 140 XBots and 200 Flyways via your choice of PLC or directly from a PC through our C# and Python APIs.

























Dimensions:
179 x 136 x 29.5 mm
Weight:
1.0 kg
Supply Voltage:
18-58 VDC
Power Consumption:
7 W
Washdown:
Yes
Cooling:
Passive
Fieldbus:
EtherCAT, Profinet IRT, Powerlink, EtherNet/IP,CC-Link IE Field, CC-Link IE TSN







Planar Motor Incorporated © 2025 All rights reserved