1
Design & simulate
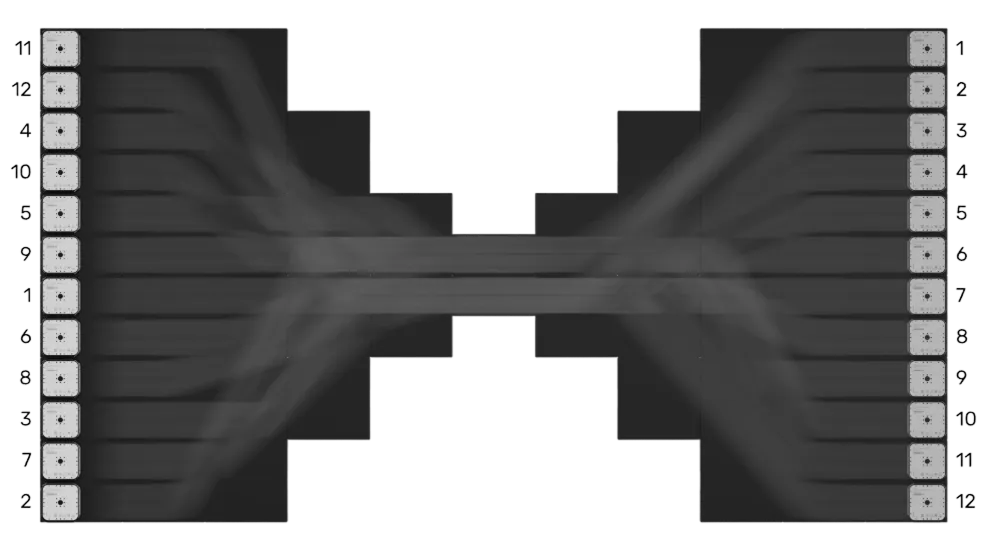
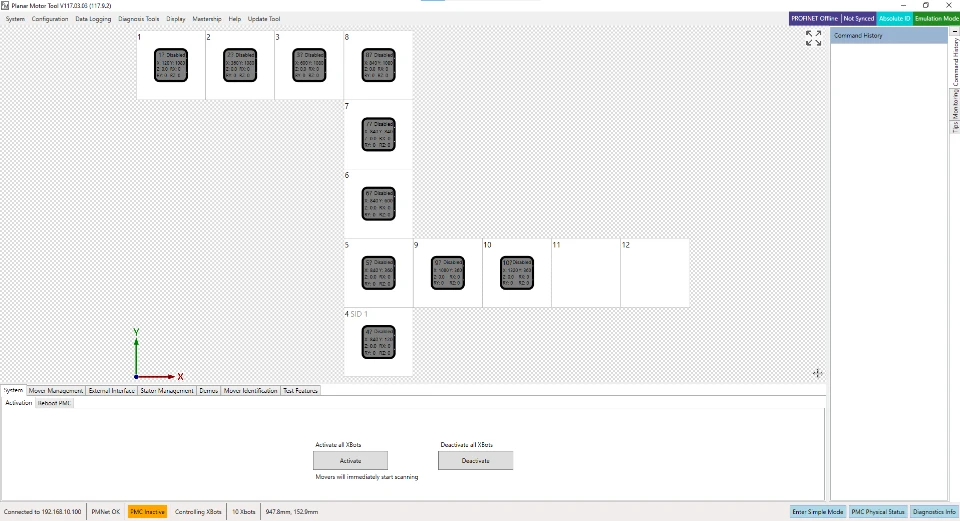
Planar Motor Tool & Application Designer — build Flyway layouts, define stations and motion sequences visually, and validate your system in emulation before touching hardware. Export to Visual Components, iPhysics, or Emulate3D for full-machine simulation.
2
Develop & integrate
PMLib — one unified library across 25+ PLC and PC platforms. Use your existing automation environment (Siemens, Rockwell, Beckhoff, Omron, Keyence, and more) or code directly in Python, C#, MATLAB, or LabVIEW. Your platform. Your choice.
3
Run & produce
Firmware-level collision avoidance with stereotype awareness, auto-driving for system initialization, zone management, stream mode, and conveyor integration — the PMC handles system-level complexity so your code stays focused on process.